

Quando criança, eu adorava assistir desenhos animados com carros que pareciam dirigir sozinhos. Isso me fez pensar se esses carros poderiam ser reais e se havia pequenos robôs dentro deles, dirigindo-os magicamente.
À medida que envelhecemos, os carros autônomos estão se tornando reais! Estou genuinamente fascinado por eles. Eles entendem quando parar nos sinais de parada e no semáforo vermelho, por exemplo? Eles conseguem ver animais e pessoas andando na estrada? E que tal dirigir quando está escuro lá fora ou quando o tempo está chuvoso ou com neve?

Vamos falar sobre carros autônomos! São carros que podem dirigir sozinhos sem motorista humano. Empresas como Tesla e Waymo usam técnicas computacionais inteligentes, como aprendizagem profunda, para tornar esses carros superinteligentes. O aprendizado profundo ajuda os carros a fazer coisas legais, como entender os sinais de trânsito e dirigir com segurança mesmo quando o tempo está péssimo. É tudo uma questão de usar tecnologia avançada para moldar a forma como nos moveremos no futuro!
últimas postagens
História
A história dos automóveis autônomos é semelhante a uma aventura longa e emocionante. Imagine a década de 1920, quando os veículos autônomos ainda eram apenas um sonho para as pessoas. Uma mente inventiva, Francis Houdina, destacou-se ao criar um carro que seguia as linhas da estrada. No entanto, precisava de fios especiais escondidos sob a estrada para guiá-lo.
 Fonte: theatlantic.com
Fonte: theatlantic.com
Avançando para as décadas de 1980 e 1990, as mentes brilhantes da Universidade Carnegie Mellon estavam no caminho certo. Eles desenvolveram carros que podiam “ver” usando câmeras, ajudando-os a navegar pelas ruas movimentadas da cidade. Esses carros eram como exploradores que aprendiam, descobrindo como dirigir olhando ao redor.
Então, chegou um momento significativo em 2004, tendo como pano de fundo um desafio no deserto. Carros autônomos entraram em cena, tentando uma corrida difícil – uma corrida que eles não venceram, mas foi um começo. Pense nisso como seu campo de treinamento para se tornarem melhores motoristas.
No entanto, o verdadeiro avanço aconteceu nas décadas de 2000 e 2010, quando grandes empresas como Tesla, Uber e Google (agora Waymo) entraram no setor automóvel. O Google começou a testar carros autônomos em 2009. Avançando para 2015, os carros da Tesla introduziram um recurso onde eles podiam dirigir parcialmente sozinhos em determinadas estradas. Eles poderiam dirigir e permanecer na estrada sem controle humano constante.
À medida que mais empresas aderiram à corrida, a competição para criar carros totalmente autônomos esquentou. Imagine equipes de inventores correndo para fabricar carros que pudessem dirigir sem a necessidade de humanos para dirigi-los.
Mas a história continua. Ainda estamos trabalhando para fabricar carros que possam dirigir sozinhos, o que mudaria a forma como viajamos. Essa aventura ainda está acontecendo e significa que poderíamos ter viagens mais seguras e fáceis porque esses carros sofisticados e autônomos estão cada vez melhores.
Como funcionam os carros autônomos?
Carros autônomos são como tomadores de decisão superinteligentes! Eles usam câmeras, LiDAR, RADAR, GPS e sensores de inércia para coletar dados sobre o ambiente. Em seguida, algoritmos especiais chamados algoritmos de aprendizagem profunda processam esses dados para entender o que está acontecendo ao seu redor. Com base nesse entendimento, eles tomam decisões importantes para dirigir com segurança e tranquilidade.
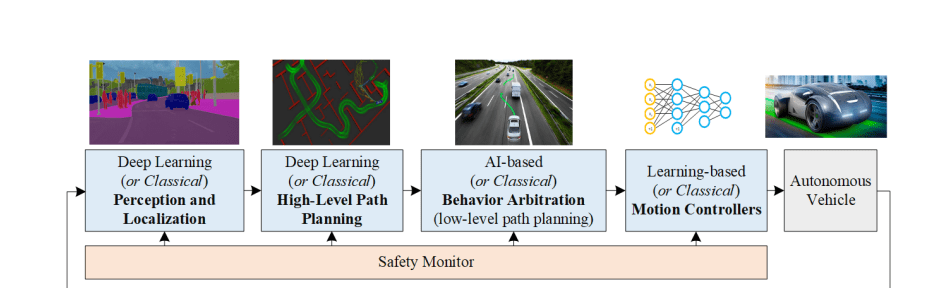 Fonte: arxiv.org
Fonte: arxiv.org
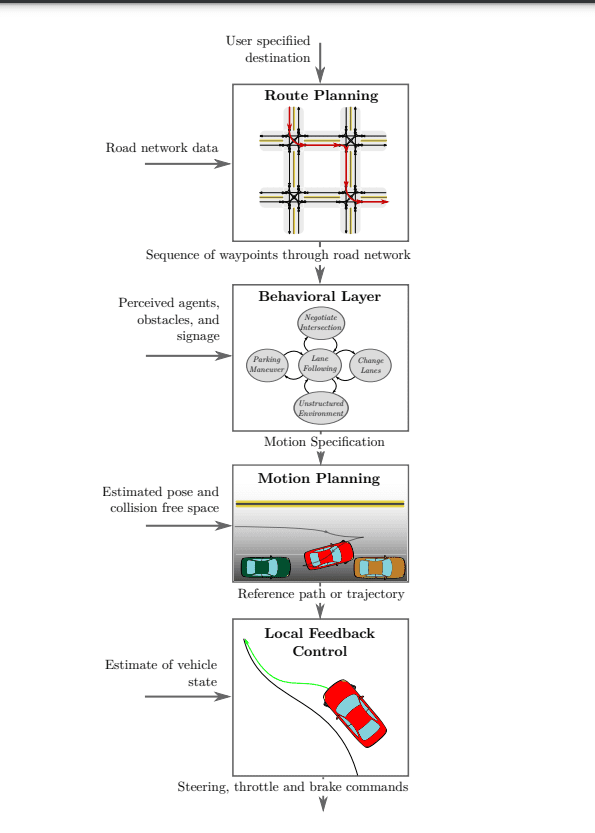
Se quisermos descobrir como os carros autônomos realmente funcionam, vamos dar uma olhada nessas quatro partes mostradas no diagrama acima. É como resolver um quebra-cabeça – compreender cada peça nos ajudará a ter uma visão geral de como esses carros incríveis funcionam:
- Percepção
- Localização
- Predição
- Tomando uma decisão
- Planejamento de caminho de alto nível
- Arbitragem Comportamental
- Controlador de movimento
Percepção
#1. Câmera
As câmeras são como os olhos de um carro autônomo – são superimportantes! Eles ajudam o carro a saber o que está acontecendo ao seu redor. Essas câmeras fazem trabalhos diferentes, como descobrir o que são as coisas, separar diferentes partes e descobrir onde está o carro.
Para garantir que o carro não perca nada, ele possui câmeras espalhadas por toda parte – na frente, atrás, esquerda e direita. Essas câmeras trabalham juntas para criar uma imagem geral de tudo ao redor do carro. É como se fosse a visão especial de 360 graus do carro!

Essas câmeras não são apenas para exibição. Eles são inteligentes. Alguns olham para longe, até 200 metros, para que o carro saiba o que vem pela frente. Outros se concentram nas coisas próximas para que o carro possa prestar muita atenção aos detalhes. Essa equipe de câmeras ajuda o carro a ver e entender tudo, como um amigo o guiando, para que ele possa dirigir com segurança e fazer boas escolhas.
Às vezes, as câmeras são muito úteis, como ao estacionar, porque mostram uma visão ampla e ajudam a fazer boas escolhas para dirigir com cuidado.
Mas usar câmeras apenas para ver as coisas apresenta problemas, especialmente em climas difíceis, como neblina, chuva forte e à noite. Nestes tempos, as fotos das câmeras podem parecer estranhas e confusas, o que pode ser muito perigoso.
Para lidar com essas situações desafiadoras, precisamos de sensores especiais que possam funcionar quando está muito escuro ou mesmo totalmente à noite. Eles também deveriam ser capazes de medir a que distância as coisas estão sem precisar de luz que possamos ver. Quando colocamos esses sensores nos olhos do carro (sistema de percepção), o carro fica melhor dirigindo com mau tempo ou quando está difícil de enxergar. Assim, o carro pode dirigir com mais segurança, o que é ótimo para quem dirige na estrada.
#2. LiDAR
LiDAR, que significa Light Detection And Ranging, é uma tecnologia sofisticada que usa lasers para descobrir a que distância as coisas estão. O LiDAR envia raios laser e mede quanto tempo eles levam para voltar das coisas.

Quando o LiDAR e as câmeras trabalham juntos, eles ajudam o carro a entender as coisas com mais clareza. Faz um mapa 3D do que está ao redor do carro. Essas informações especiais podem então ser visualizadas por programas de computador inteligentes, que ajudam o carro a adivinhar o que outros carros poderiam fazer. Isto é útil quando a estrada é complicada, como em cruzamentos movimentados, porque o carro pode observar outros carros e dirigir com segurança.
No entanto, o LiDAR tem limitações que podem ser problemáticas. Embora funcione bem à noite e em ambientes escuros, pode ter dificuldades em condições com interferência de chuva ou neblina, levando potencialmente a imprecisões na percepção. Para resolver esses problemas, usamos sensores LiDAR e RADAR ao mesmo tempo. Esses sensores fornecem informações extras que ajudam o carro a entender as coisas com mais clareza. O carro pode dirigir sozinho de maneira melhor e mais segura.
#3. RADAR
RADAR, que significa Radio Detection and Ranging, é usado há muito tempo no dia a dia e também pelos militares. Originalmente usado pelos militares para detectar objetos, o RADAR calcula distâncias usando sinais de ondas de rádio. Hoje em dia, o RADAR é vital em muitos carros, principalmente nos que dirigem sozinhos.
O RADAR é incrível porque pode funcionar em qualquer tipo de clima e luz. Em vez de lasers, utiliza ondas de rádio, o que o torna flexível e super útil. Porém, o RADAR é considerado um sensor barulhento, o que significa que pode detectar obstáculos mesmo quando a câmera não vê nenhum.
O cérebro do carro autônomo pode ficar confuso com todos os sinais extras do RADAR, que chamamos de “ruído”. Para corrigir isso, o carro precisa limpar as informações do RADAR para poder fazer boas escolhas.
Limpar os dados significa usar truques especiais para distinguir os sinais fortes dos fracos, como separar as coisas importantes das não tão importantes. O carro usa um truque inteligente chamado Fast Fourier Transforms (FFT) para entender ainda melhor as informações.
RADAR e LiDAR fornecem informações sobre pontos únicos, como pontos no papel. Para entender melhor esses pontos, o carro usa algo como agrupamento. É como quando você junta coisas semelhantes. O carro usa métodos estatísticos inteligentes, como agrupamento euclidiano ou agrupamento K-means, para combinar pontos semelhantes e compreendê-los. Isso torna o carro capaz de dirigir de maneira mais inteligente e segura.
Localização
Em carros autônomos, os algoritmos de localização desempenham um papel crucial na determinação da posição e orientação do veículo durante a navegação, conhecido como Odometria Visual (VO). VO funciona identificando e combinando pontos-chave em quadros de vídeo consecutivos.
O carro analisa pontos especiais nas informações, como marcas em um mapa. Depois disso, o carro usa estatísticas chamadas SLAM para descobrir onde as coisas estão e como estão se movendo. Isso ajuda o carro a saber o que está ao redor, como estradas e pessoas.

E para fazer isso ainda melhor, o carro usa algo chamado aprendizado profundo. É como um computador superinteligente.
Esses truques tornam o carro bom em entender muito bem as coisas. Redes neurais como PoseNet e VLocNet++ aproveitam dados de pontos para estimar a posição 3D e orientação de objetos. Essas posições e orientações 3D estimadas podem então ser utilizadas para derivar a semântica da cena, conforme demonstrado na imagem abaixo. Quando o carro usa matemática e truques inteligentes de computador, ele sabe onde está e o que está ao seu redor. Isso ajuda o carro a dirigir com segurança e suavidade por conta própria.
Predição
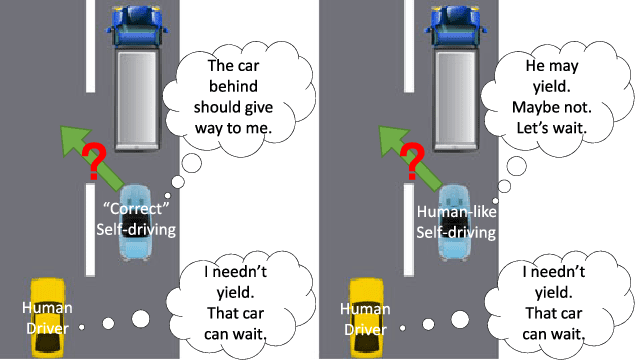
Compreender os condutores humanos é, de facto, uma tarefa complexa, pois envolve emoções e reações, em vez de lógica simples. Como não sabemos o que os outros motoristas farão, é crucial que os carros autônomos façam boas suposições sobre suas ações. Isso ajuda a garantir a segurança na estrada.
Imagine carros autônomos com olhos ao redor, como uma visão de 360 graus. Isso permite que eles vejam tudo acontecendo. Eles usam essas informações com aprendizado profundo. O carro usa técnicas inteligentes para prever o que outros motoristas poderão fazer. É semelhante a jogar um jogo em que você planeja se sair bem.
Os sensores especiais dos carros autônomos são como os olhos. Eles ajudam os carros a saber o que estão nas fotos, encontrar coisas ao seu redor, saber onde estão e ver onde as coisas terminam. Isso ajuda o carro a descobrir o que está por perto e a fazer escolhas inteligentes.
Durante o treinamento, algoritmos de aprendizagem profunda modelam informações complexas de imagens e pontos de dados em nuvem obtidos de LiDARs e RADARs. Durante a condução real (inferência), o mesmo modelo ajuda o carro a se preparar para possíveis movimentos, incluindo frenagem, parada, desaceleração, mudança de faixa e muito mais.
O aprendizado profundo é como um ajudante inteligente para o carro. Isso faz com que o carro entenda coisas sobre as quais não tem certeza, descubra sua localização e dirija melhor. Isso mantém a condução segura e torna tudo mais suave.
Mas a parte complicada é decidir a melhor ação entre algumas opções. Escolher os movimentos certos requer uma reflexão cuidadosa para que o carro possa dirigir bem e permanecer seguro.
Tomando uma decisão
Os carros autônomos precisam fazer escolhas importantes em situações complicadas, mas não é fácil. Isso ocorre porque os sensores nem sempre estão corretos e as pessoas na estrada podem fazer coisas inesperadas. O carro deve adivinhar o que os outros farão e se mover para evitar acidentes.
Para fazer escolhas, o carro precisa de muitas informações. O carro reúne essas informações por meio de sensores e, em seguida, usa algoritmos de aprendizado profundo para entender onde as coisas estão e prever o que pode acontecer. A localização ajuda o carro a conhecer sua posição inicial, enquanto a previsão gera múltiplas ações possíveis com base no ambiente.
Porém, permanece a questão: como o carro escolhe a melhor ação entre as tantas previstas?
 Fonte: semanticscholar.org
Fonte: semanticscholar.org
Deep Reinforcement Learning (DRL) é uma técnica para tomar decisões e usa um algoritmo chamado Markov Decision Process (MDP). O MDP é útil para adivinhar como as pessoas na estrada poderão agir no futuro. Quando há mais coisas se movendo, as coisas ficam mais complicadas. Isso significa que o carro autônomo precisa pensar em ainda mais ações possíveis.
Para enfrentar o desafio de encontrar o melhor movimento para o carro, o modelo de aprendizagem profunda é otimizado usando otimização bayesiana. Em alguns casos, uma estrutura que combina um Modelo Oculto de Markov e Otimização Bayesiana é empregada para a tomada de decisões, permitindo que o carro autônomo navegue de forma eficaz e segura em vários cenários complexos.
 Fonte: arxiv.org
Fonte: arxiv.org
A tomada de decisões em carros autônomos segue um processo hierárquico com quatro componentes principais:
Planejamento de Caminho ou Rota: No início da viagem, o carro determina a melhor rota desde sua posição atual até o destino desejado. O objetivo é encontrar uma solução ótima entre várias rotas possíveis.
Arbitragem de Comportamento: O carro deve percorrer a rota após planejá-la. O carro está ciente de objetos estáticos como estradas e cruzamentos, mas é incapaz de prever as ações exatas de outros motoristas. Para lidar com essa incerteza, usamos métodos inteligentes como Processos de Decisão Markov (MDPs) para planejamento.
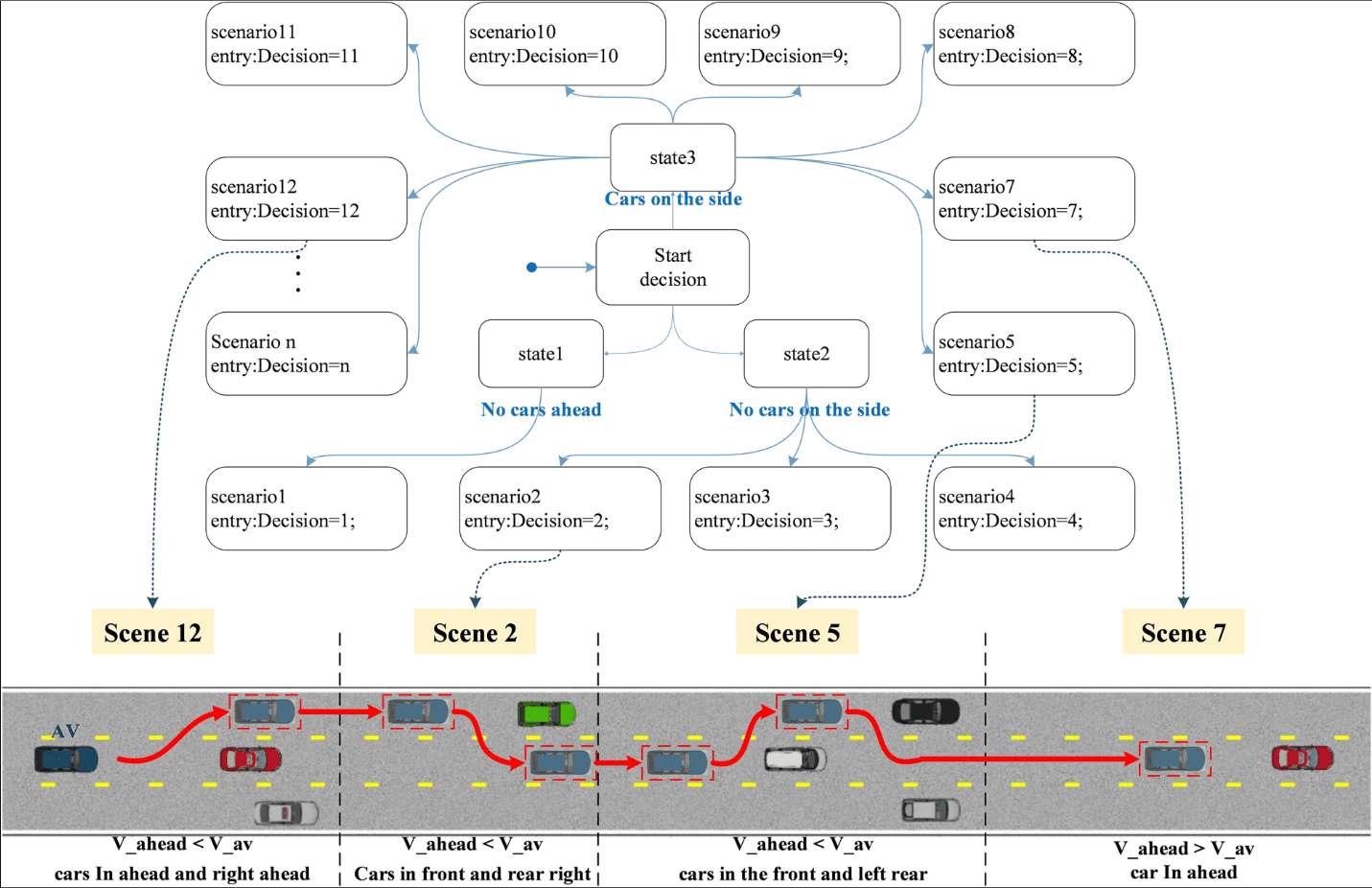 Decisão de cenário da máquina de estado superior
Decisão de cenário da máquina de estado superior
Planejamento de Movimento: Com a rota planejada e a camada de comportamento determinando como navegar nela, o sistema de planejamento de movimento coordena os movimentos do carro. Isso significa garantir que o carro se mova de maneira segura e confortável para as pessoas dentro dele. Ele pensa em coisas como quão rápido ele vai, mudando de faixa e o que está ao seu redor.
Controle do Veículo: A etapa final é o controle do veículo, que executa o caminho de referência gerado pelo sistema de planejamento de movimento, garantindo que o carro siga a trajetória pretendida de maneira suave e segura.
Ao dividir a tomada de decisões nessas diferentes partes, os carros autônomos podem dirigir bem e com segurança em locais complicados. Isso garante que os passageiros tenham uma viagem tranquila e confortável.
Redes Neurais Convolucionais
Redes neurais convolucionais (CNNs) são amplamente utilizadas em carros autônomos devido à sua capacidade de modelar informações espaciais, principalmente imagens. As CNNs são excelentes na extração de recursos de imagens, o que as torna úteis para descobrir muitas coisas diferentes.
Numa CNN, à medida que a profundidade da rede aumenta, diferentes camadas capturam padrões variados. As camadas iniciais detectam características simples, como bordas, enquanto as camadas mais profundas reconhecem características mais complexas, como formas de objetos (como folhas de árvores ou pneus de veículos). Essa adaptabilidade é a razão pela qual as CNNs são um algoritmo central em carros autônomos.
O componente central de uma CNN é a camada convolucional, que utiliza um kernel convolucional (matriz de filtro) para processar regiões locais da imagem de entrada.
A matriz de filtros é atualizada durante o treinamento para obter pesos significativos. Uma propriedade fundamental das CNNs é o compartilhamento de peso, onde os mesmos parâmetros de peso são usados para representar diferentes transformações, economizando espaço de processamento e permitindo diversas representações de recursos.
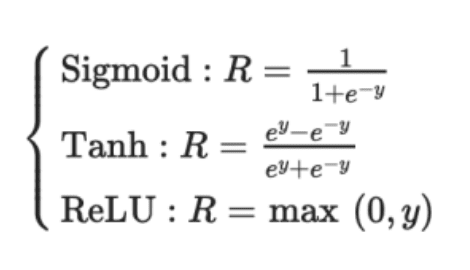
A saída da camada convolucional geralmente passa por uma função de ativação não linear, como Sigmoid, Tanh ou ReLU. ReLU é preferido porque converge mais rápido que os outros. Além disso, o resultado geralmente passa por uma camada de pooling máximo. Isso mantém detalhes importantes da imagem, como plano de fundo e texturas.
Três propriedades essenciais das CNNs as tornam versáteis e fundamentais em carros autônomos:
- Campos Receptivos Locais
- Pesos Compartilhados
- Amostragem Espacial
Essas propriedades reduzem o overfitting e armazenam representações críticas e recursos cruciais para classificação, segmentação, localização de imagens e muito mais.
Aqui estão duas redes CNN usadas por empresas pioneiras em carros autônomos:
- HydraNet da Tesla
- ChauffeurNet do Google Waymo
Saiba mais sobre Redes Neurais Convolucionais.
#1. HydraNet da Tesla
HydraNet é uma arquitetura dinâmica introduzida por Ravi et al. em 2018, desenvolvido principalmente para segmentação semântica em carros autônomos. Seu principal objetivo é melhorar a eficiência computacional durante a inferência.
O conceito do HydraNet envolve ter diferentes redes CNN, chamadas de filiais, atribuídas a tarefas específicas. Cada ramificação recebe várias entradas, e a rede pode escolher seletivamente quais ramificações executar durante a inferência, agregando, em última análise, as saídas de diferentes ramificações para tomar uma decisão final.
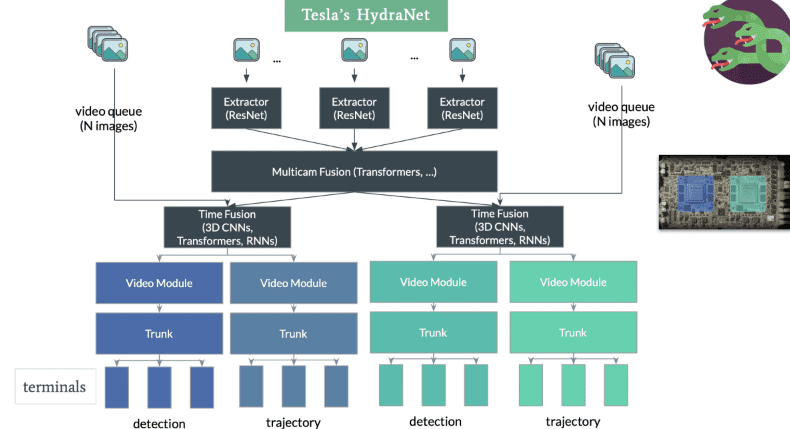
No contexto dos carros autônomos, os insumos podem representar diferentes aspectos do ambiente, como objetos estáticos (árvores e grades de estradas), estradas e pistas, semáforos, etc. Durante a inferência, o mecanismo de portão decide quais ramificações ativar e o combinador coleta suas saídas para tomar a decisão final.
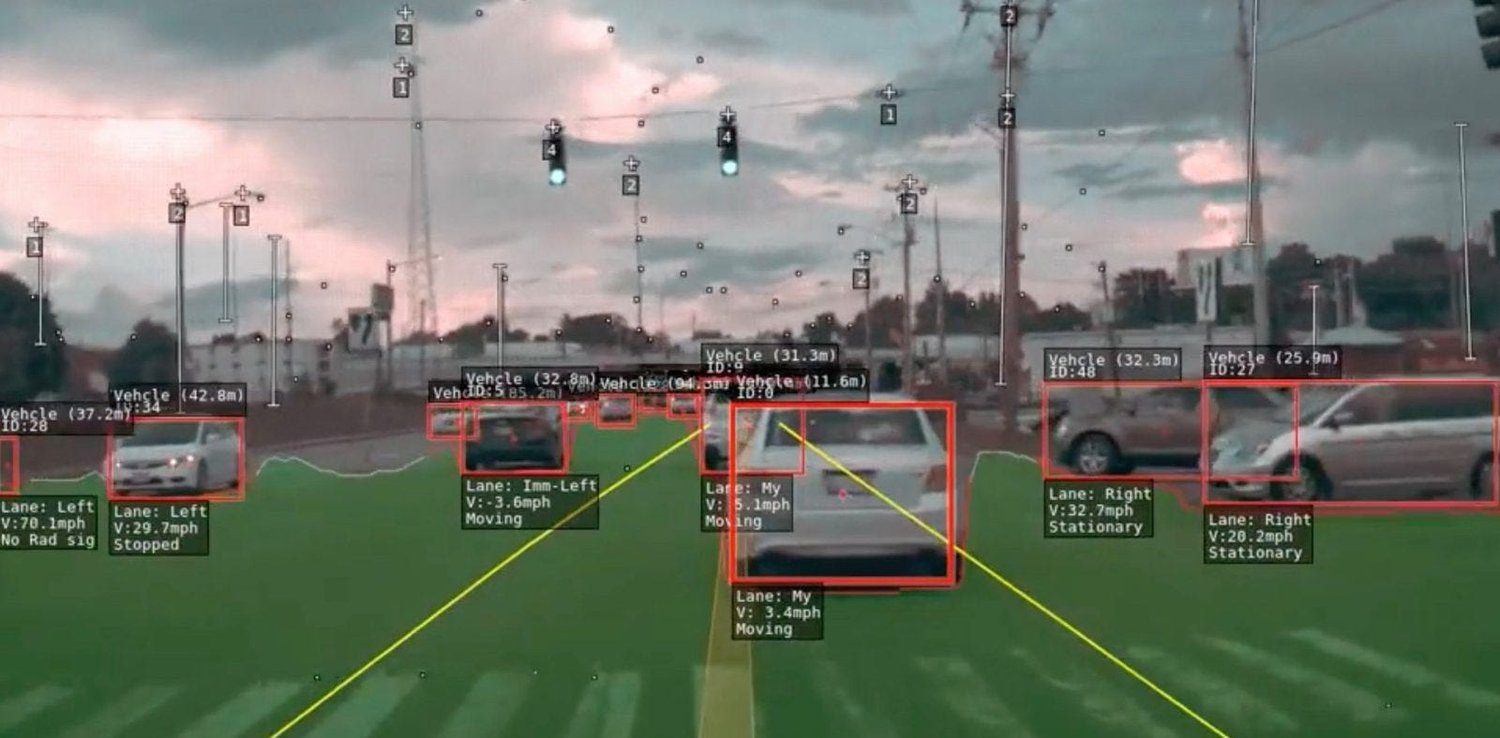 Detecção de velocidade, faixa e movimento
Detecção de velocidade, faixa e movimento
A Tesla adaptou a arquitetura HydraNet, incorporando um backbone compartilhado para enfrentar os desafios na segregação de dados para tarefas individuais durante a inferência. O backbone compartilhado, geralmente blocos ResNet-50 modificados, permite que a rede seja treinada nos dados de todos os objetos. Cabeçalhos específicos de tarefas baseados na arquitetura de segmentação semântica, como o U-Net, permitem que o modelo preveja resultados específicos para cada tarefa.

O HydraNet da Tesla se destaca pela capacidade de projetar uma visão panorâmica, criando uma representação 3D do ambiente de qualquer ângulo. Essa dimensionalidade aprimorada auxilia o carro em uma melhor navegação. Notavelmente, Tesla consegue isso sem usar sensores LiDAR. Em vez disso, depende apenas de dois sensores: uma câmera e um radar. A eficiência do HydraNet da Tesla permite processar informações de oito câmeras e gerar percepção de profundidade, demonstrando capacidades impressionantes sem a necessidade de tecnologia LiDAR adicional
#2. ChauffeurNet do Google Waymo
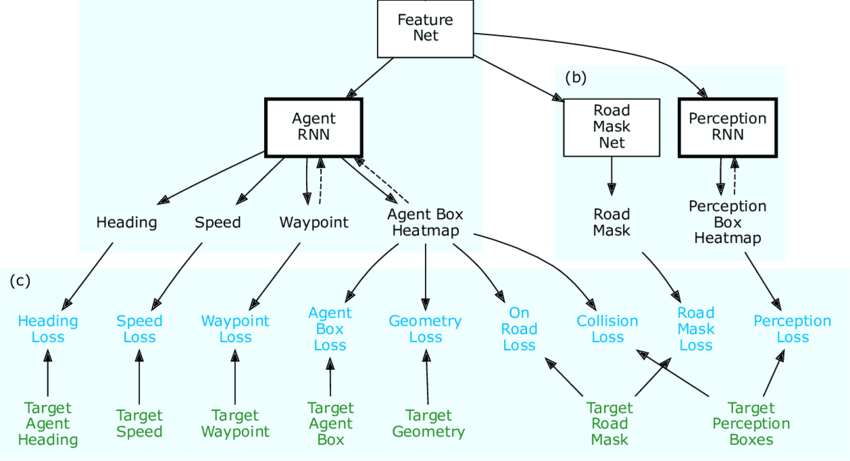
ChauffeurNet é uma rede neural baseada em RNN usada pelo Google Waymo para treinar carros autônomos usando aprendizagem por imitação. Embora dependa principalmente de um RNN para gerar trajetórias de direção, ele também incorpora um componente CNN conhecido como FeatureNet.
Esta rede de características convolucionais extrai representações contextuais de características compartilhadas por outras redes e é usada para extrair características do sistema de percepção.
 Fonte: Researchgate
Fonte: Researchgate
O conceito por trás do ChauffeurNet é treinar o carro autônomo imitando motoristas experientes usando aprendizagem por imitação. Para superar a limitação da insuficiência de dados de treinamento do mundo real, os autores do artigo “ChauffeurNet: Learning to Drive by Imitating the Best and Synthesizing the Worst” introduziram dados sintéticos.
Esses dados sintéticos introduzem vários desvios, como perturbar o caminho da trajetória, adicionar obstáculos e criar cenas não naturais. Descobriu-se que treinar o carro com dados sintéticos é mais eficiente do que usar apenas dados reais.
No ChauffeurNet, o sistema de percepção não faz parte do processo ponta a ponta, mas atua como um sistema de nível médio. Isso permite que a rede tenha diversas variações de entrada do sistema de percepção. A rede observa uma representação de nível médio da cena a partir dos sensores e, usando essa entrada junto com dados sintéticos, imita o comportamento de direção especializado.
Ao levar em consideração a tarefa de percepção e criar uma visão panorâmica de alto nível do ambiente, o ChauffeurNet facilita o aprendizado de transferência, permitindo que a rede tome melhores decisões com base em dados reais e simulados. A rede gera trajetórias de direção prevendo iterativamente pontos sucessivos no caminho de direção com base nas representações de nível médio. Esta abordagem tem-se mostrado promissora na formação de automóveis autónomos de forma mais eficaz, proporcionando um caminho para sistemas de condução autónoma mais seguros e fiáveis.
#3. Processo de decisão de Markov parcialmente observável usado para carros autônomos
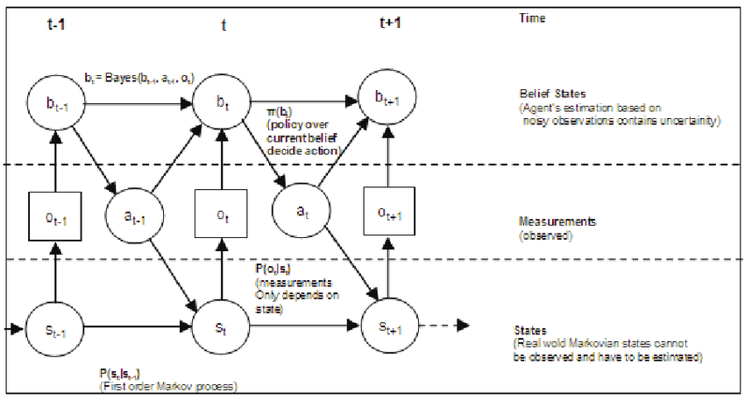
O Processo de Decisão Markov Parcialmente Observável (POMDP) é uma estrutura matemática usada no contexto de carros autônomos para tomar decisões sob incerteza. Em cenários do mundo real, os carros autônomos geralmente têm informações limitadas sobre o ambiente devido ao ruído dos sensores, oclusões ou sistemas de percepção imperfeitos. O POMDP foi projetado para lidar com essa observabilidade parcial e tomar decisões ideais, considerando a incerteza e as observações disponíveis.
Num POMDP, o agente tomador de decisão opera num ambiente com estados parcialmente observáveis. O agente entra em ação e o ambiente faz a transição para novos estados probabilisticamente. Porém, o agente recebe apenas observações parciais ou informações ruidosas sobre o verdadeiro estado do ambiente. O objetivo é encontrar uma política que maximize a recompensa cumulativa esperada ao longo do tempo, considerando a incerteza do ambiente e as observações do agente.
 Fonte: Researchgate
Fonte: Researchgate
No contexto de carros autônomos, o POMDP é particularmente útil para tarefas como planejamento de movimento, previsão de trajetória e interação com outros usuários da estrada. O carro autônomo pode usar o POMDP para tomar decisões sobre mudanças de faixa, ajustes de velocidade e interações com pedestres e outros veículos, considerando a incerteza do ambiente circundante.
O POMDP tem seis componentes e pode ser denotado como POMDP
M:= (I, S, A, R, P, γ)
onde,
I: Observações
S: Conjunto finito de estados
A: Conjunto finito de ações
R: Função de recompensa
P: Função de probabilidade de transição
γ: fator de desconto para recompensas futuras.
Os POMDPs podem ser desafiadores computacionalmente devido à necessidade de considerar vários estados e observações possíveis. No entanto, algoritmos avançados, como o planeamento do espaço de crenças e os métodos de Monte Carlo, são frequentemente utilizados para aproximar eficientemente a política ideal e permitir a tomada de decisões em tempo real em carros autónomos.
Ao incorporar o POMDP nos seus algoritmos de tomada de decisão, os carros autónomos podem navegar em ambientes complexos e incertos de forma mais eficaz e segura, considerando a incerteza nas leituras dos sensores e tomando decisões informadas para atingir os objetivos pretendidos.
O automóvel autônomo, funcionando como agente, aprende interagindo com o ambiente por meio do aprendizado por reforço (RL), uma espécie de aprendizado de máquina. Estado, ação e recompensa são as três variáveis importantes no centro do Deep Reinforcement Learning (DRL).
Estado: Descreve a situação atual do carro autônomo em um determinado momento, como sua posição na estrada.
Ação: Representa todos os movimentos possíveis que o carro pode realizar, incluindo decisões como mudanças de faixa ou ajustes de velocidade.
Recompensa: Fornece feedback ao carro sempre que ele realiza uma ação específica. A recompensa pode ser positiva ou negativa, e o objetivo do DRL é maximizar as recompensas cumulativas.
Ao contrário do aprendizado supervisionado, onde o algoritmo recebe explicitamente as ações corretas, o DRL aprende explorando o ambiente e recebendo recompensas com base em suas ações. A rede neural do carro autônomo é treinada em dados de percepção, que incluem recursos extraídos por redes neurais convolucionais (CNNs).
Os algoritmos DRL são então treinados nessas representações, que são transformações de menor dimensão da entrada, resultando em uma tomada de decisão mais eficiente durante a inferência.
Treinar carros autônomos em cenários do mundo real é perigoso e impraticável. Em vez disso, são treinados em Simuladores, onde não há risco para a segurança humana.
 Simulador
Simulador
Alguns simuladores de código aberto são:
Ao combinar dados de percepção com aprendizagem por reforço, os carros autônomos podem aprender a navegar em ambientes complexos, tomar decisões seguras e ideais e tornar-se mais aptos a lidar com cenários de direção do mundo real.
Perguntas frequentes
O que são veículos autônomos?
Os veículos autônomos, comumente chamados de carros autônomos, são automóveis com sensores de última geração e inteligência artificial que podem navegar e dirigir por conta própria. Esses veículos avaliam seu ambiente e fazem julgamentos de direção usando câmeras, LiDAR, RADAR e algoritmos sofisticados.
Os veículos autônomos são seguros?
No desenvolvimento de automóveis autônomos, a segurança vem em primeiro lugar. Para garantir que cumpram normas de segurança rigorosas, estes veículos são submetidos a testes e simulações exaustivos. Embora tenha havido incidentes durante os testes, o objectivo final é tornar os carros autónomos mais seguros do que os conduzidos por humanos.
Os veículos autônomos podem ser usados em qualquer clima?
Condições climáticas extremas, incluindo chuva forte ou neve, podem apresentar problemas para automóveis autônomos. Condições meteorológicas desfavoráveis podem reduzir a precisão dos sensores e prejudicar a capacidade de condução. Os engenheiros estão constantemente tentando fazer com que a tecnologia funcione melhor em condições climáticas adversas.
Veículos autônomos – são permitidos?
A legalidade dos veículos autônomos varia de acordo com o país e o local. Para acomodar veículos autónomos, muitas jurisdições estão a rever as suas leis e regulamentos. Testes de carros autônomos e implantação limitada já são permitidos em algumas áreas.
Os veículos autônomos precisam de intervenção humana?
A maioria dos carros autônomos disponíveis atualmente estão no nível 2 ou 3 de automação, onde às vezes podem precisar de assistência humana. A indústria, no entanto, esforça-se para atingir níveis mais elevados de automação, como o nível 4 ou o nível 5, onde a intervenção humana se torna mínima ou desnecessária.
Conclusão
Concluindo, os carros autônomos têm a capacidade de transformar a indústria automobilística, aumentando a eficiência e a segurança nas estradas. Analisamos todos os componentes essenciais que suportam esses carros autônomos, incluindo LiDAR, RADAR, câmeras e algoritmos avançados.
Embora os progressos tenham sido promissores, ainda existem desafios importantes a enfrentar. Atualmente, os carros autônomos estão no nível 2 do nível 5 de avanço, exigindo intervenção humana em determinados cenários. No entanto, através de dedicação e inovação contínuas, estamos cada vez mais perto de alcançar a autonomia total.
Principais conclusões
Avançando algoritmos: A otimização adicional dos algoritmos é crucial para melhorar a percepção da estrada, especialmente em condições desafiadoras onde podem faltar marcações e sinais rodoviários.
Refinando a modalidade de detecção: Melhorar a precisão e a eficiência das modalidades de detecção para mapeamento e localização será fundamental para alcançar níveis mais elevados de autonomia.
Comunicação entre veículos: A criação de um ecossistema rodoviário interligado e inteligente será possível através da prossecução da comunicação entre veículos.
Interacção Homem-Máquina: Incentivar a aceitabilidade pública das tecnologias de condução autónoma exigirá examinar e abordar questões relacionadas com a interacção homem-máquina.
Perspectivas Futuras: Apesar das dificuldades, as conquistas até agora são notáveis e, com cooperação e investigação contínuas, os automóveis autónomos oferecem o potencial para proporcionar um ambiente de transporte mais seguro e eficaz para todos.
Estamos todos na mesma jornada em direção a carros autônomos e completamente autônomos. À medida que resolvemos desafios e estimulamos a inovação, aproximamo-nos de um momento em que os veículos gerirão suavemente as nossas estradas, melhorando a segurança, o ambiente e a conveniência para todos.
Agora você pode aprender sobre computação espacial e sua aplicação no desenvolvimento de carros autônomos.