Principais Pontos
- Veículos autônomos utilizam a tecnologia de visão computacional para interpretar o ambiente ao seu redor, possibilitando a detecção de objetos, identificação de sinalização e navegação nas vias.
- A visão computacional em carros autônomos é um sistema que integra câmeras, processamento de alta performance e algoritmos de inteligência artificial, trabalhando em conjunto para capturar informações visuais, processá-las em tempo real e reconhecer padrões e objetos.
- A visão computacional desempenha um papel fundamental para atingir a autonomia total em veículos autônomos, permitindo a classificação de objetos, detecção de faixas e sinalização, identificação de placas e reconhecimento do fluxo de tráfego. O futuro dos carros autônomos está atrelado ao progresso em IA, processamento avançado e tecnologia de câmeras.
O conceito de carros autônomos sempre despertou grande interesse. Embora ainda não tenhamos veículos totalmente autônomos em circulação, já contamos com carros equipados com Sistemas Avançados de Assistência ao Condutor (ADAS), capazes de realizar manobras como direção automática, mudança de faixa, estacionamento e controle de cruzeiro adaptativo.
Um carro autônomo emprega diversos sensores em seu ADAS, sendo a visão computacional a principal ferramenta para detectar, identificar e calcular a distância de objetos e do entorno geral. Sem a visão computacional, a implementação de funções como controle de cruzeiro e piloto automático em carros autônomos seria altamente improvável.
O Que É Visão Computacional?
A visão computacional é uma tecnologia que capacita máquinas a “ver” e reconhecer objetos em seu ambiente. Ela é um ramo da visão computacional que se concentra em aplicações industriais de detecção de objetos em máquinas autônomas, como robôs e veículos.
Atualmente, a visão computacional emprega algoritmos de aprendizado profundo baseados em IA, como redes neurais convolucionais (CNNs), para criar modelos robustos e generalizados que conseguem identificar objetos com alta precisão em variadas condições. Isso possibilita a implementação da visão computacional em diversas tarefas que exigem alta confiabilidade nos setores de manufatura, agricultura, robótica e automotivo.
Como Funciona a Visão Computacional em Carros Autônomos?
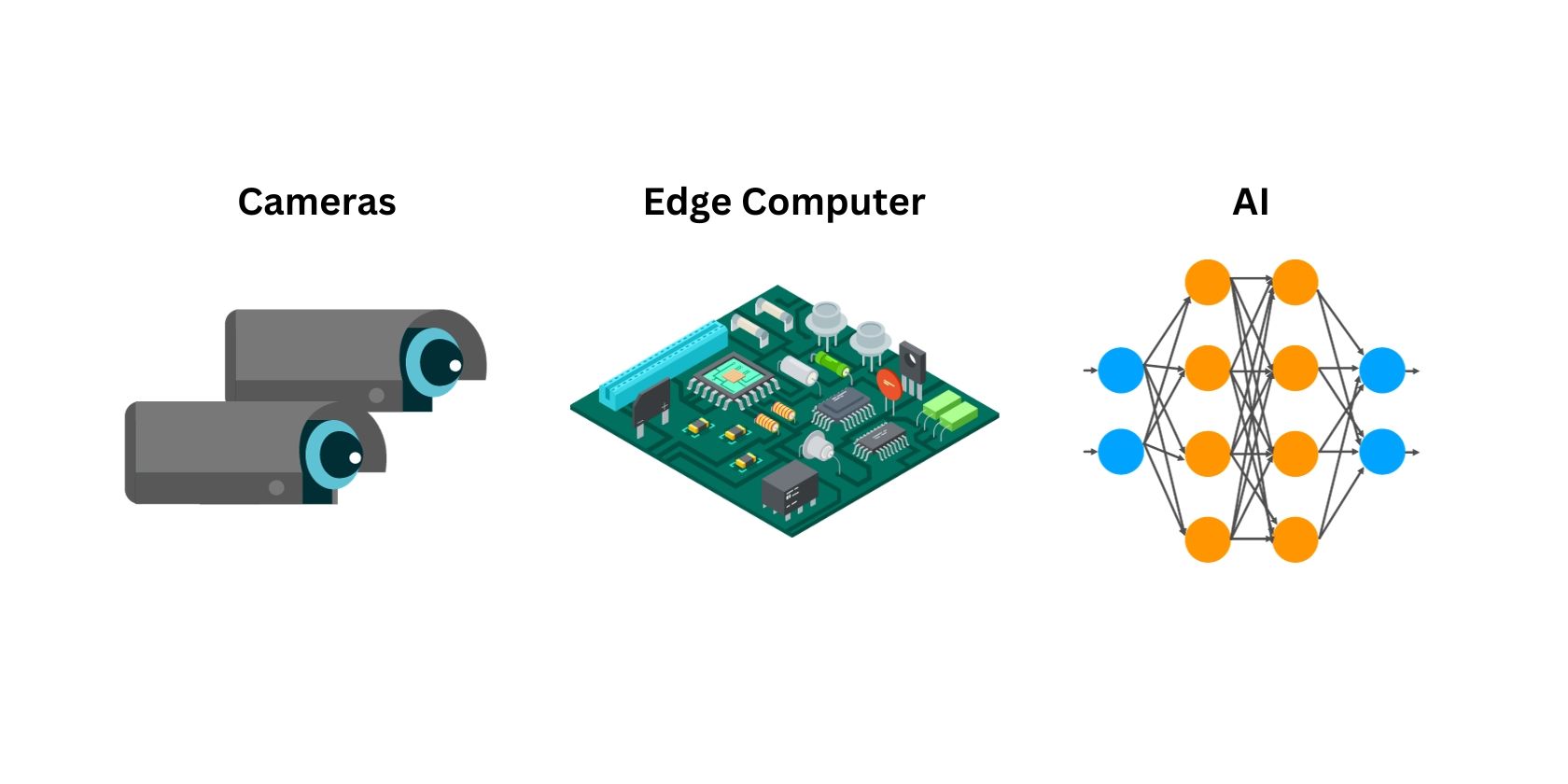
A visão computacional em carros autônomos pode ser dividida em três partes essenciais: o sistema de câmeras, o processamento (computação de ponta) e a inteligência artificial. Essa combinação tecnológica permite que o veículo autônomo “veja”, “pense” e identifique sinais e obstáculos enquanto se desloca. Vamos detalhar cada uma dessas partes para compreender como elas se unem e formam a visão computacional de um carro autônomo.
Sistema de Câmeras
A visão computacional depende de sistemas de câmeras para coletar informações visuais do ambiente. Os carros autônomos utilizam diversas câmeras instaladas em seu entorno para obter o máximo de dados visuais possível.
Dois tipos principais de sensores são empregados em câmeras de visão computacional: semicondutores de óxido metálico complementar (CMOS) e dispositivos de carga acoplada (CCD). Em veículos autônomos, o CMOS é o sensor preferido devido à sua alta velocidade de leitura, eletrônica de bordo avançada e capacidade de processamento paralelo, o que o torna mais rápido, embora suscetível a ruídos ou artefatos. Soluções como diferentes modos de iluminação, visão noturna digital e filtros podem auxiliar o sensor CMOS em condições de iluminação adversas.
As câmeras nos carros autônomos são posicionadas a distâncias específicas para criar visão estereoscópica, que é a capacidade de combinar duas ou mais entradas visuais, proporcionando a percepção de profundidade ou tridimensionalidade de objetos e do ambiente. Isso permite que os veículos triangulem e calculem a distância aproximada entre o objeto e o carro.
Assim como os humanos, que possuem dois olhos, nós também nos beneficiamos da visão estereoscópica. Você pode testar: feche um olho e selecione um objeto pequeno em sua mesa. Posicione sua mão ao lado do objeto, garantindo que a ponta do objeto esteja a cerca de cinco centímetros de distância. Tente pausar por alguns segundos e observe o quão confiante você está na sua aproximação. Agora, abra os dois olhos e veja como a sua percepção de profundidade melhora significativamente.
Computação de Borda
Enquanto o sistema de câmeras do carro autônomo coleta dados, um computador de bordo (processador de borda) processa todas as informações em tempo real, atualizando o sistema sobre as condições do ambiente. Embora tarefas típicas de visão computacional possam ser realizadas na nuvem, a conexão de carros autônomos à nuvem apresenta um risco muito alto, mesmo para terceirizar o processamento da visão computacional.
O uso de um computador de borda para processar dados de entrada elimina problemas de latência e garante que os dados sejam recebidos, processados e transmitidos em tempo real. Os computadores de borda para carros autônomos usam computadores especializados que integram processadores gráficos de IA, como Tensor Core e CUDA Cores da NVIDIA.
Algoritmos de IA
Algoritmos sempre foram essenciais para a visão computacional. O algoritmo é o que possibilita um computador identificar todos os padrões, formas e cores fornecidas pelo sistema de câmeras. O uso de IA em vez de algoritmos tradicionais de visão computacional aumenta significativamente a capacidade de um carro autônomo identificar objetos, sinalização de trânsito, marcações rodoviárias e semáforos de forma confiável. Muitos algoritmos de IA estão sendo utilizados para treinar carros autônomos. Os mais populares incluem:
- YOLO (You Only Look Once): Algoritmo de detecção de objetos em tempo real, capaz de identificar e rastrear objetos no campo de visão do veículo.
- SIFT (Scale-Invariant Feature Transform): Utilizado para extração de recursos, auxiliando o carro a reconhecer pontos de referência e objetos distintos no seu entorno.
- Histograma de Gradientes Orientados (HOG): Utilizado para reconhecimento de objetos, foca na extração de padrões e gradientes locais de imagens.
- TextonBoost: Algoritmo que auxilia no reconhecimento de objetos por meio da análise de texturas do ambiente.
- AdaBoost: Empregado para classificação de dados, o AdaBoost combina vários classificadores para tomar decisões assertivas sobre objetos e obstáculos no caminho do veículo.
A Importância da Visão Computacional em Carros Autônomos
 Crédito da imagem: Automobile Italia/Flickr
Crédito da imagem: Automobile Italia/Flickr
A visão computacional é o principal meio pelo qual um carro autônomo percebe e interpreta o ambiente ao seu redor. Sem a visão computacional, os carros autônomos provavelmente ficariam limitados ao Nível 1 na escala de autonomia de veículos e não atingiriam a autonomia total.
Graças à visão computacional, os carros autônomos agora conseguem classificar objetos, detectar faixas e sinalização, identificar placas e reconhecer o fluxo de tráfego.
Embora muitos veículos autônomos utilizem diversos sensores, como LIDAR, RADAR e SONAR, todos eles dependem fortemente da visão computacional para observar o ambiente, identificar objetos e compreender o significado da sinalização e semáforos nas vias. Esses sensores adicionais apenas complementam a visão computacional e aumentam a segurança de pessoas, animais e bens.
A visão computacional também pode operar de forma independente, sem o auxílio de outros sensores, para oferecer funcionalidades de piloto automático. De fato, os mais recentes carros autônomos da Tesla abandonaram o RADAR e agora dependem exclusivamente da visão computacional para seu sistema de piloto automático.
Isso não significa que outras tecnologias de sensores sejam menos importantes, mas demonstra a relevância e o poder da visão computacional em carros autônomos.
O Futuro da Visão Computacional em Veículos Autônomos
A visão computacional é a base dos carros autônomos. Através dela, os carros podem ver e perceber o ambiente de forma semelhante aos humanos. Embora desafios ainda existam, os benefícios da visão computacional em termos de segurança e navegação são inegáveis. Em relação ao futuro dos veículos autônomos, qualquer progresso adicional em IA, computação de ponta e tecnologia de câmeras certamente tornará os carros autônomos mais eficientes e provavelmente os levará a um nível mais elevado de automação.